[IROS-24] Lang2LTL-2: Grounding Spatiotemporal Navigation Commands Using Large Language and Vision-Language Models
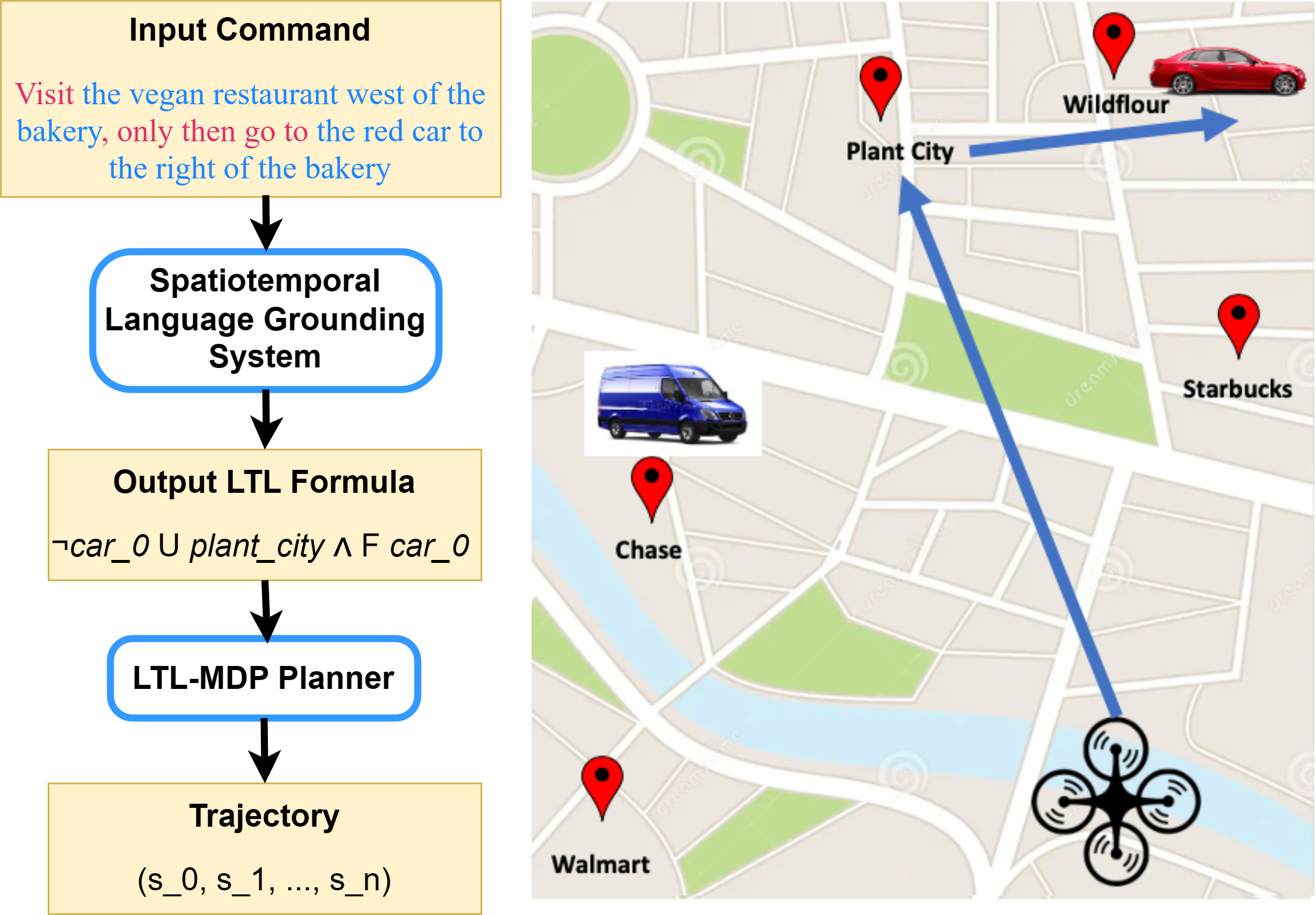
TL;DR – Building on prior work (Lang2LTL - CoRL 2023), this paper introduces a modular system that enables robots to follow natural language commands with spatiotemporal referring expressions. This system leverages multi-modal foundation models as well as linear temporal logic.