[ICRA-25] Bootstrapping Object-level Planning with Large Language Models
TL;DR – This paper formalizes the concept of object-level planning and discusses how this level of planning naturally integrates with large language models (LLMs).
TL;DR – This paper formalizes the concept of object-level planning and discusses how this level of planning naturally integrates with large language models (LLMs).
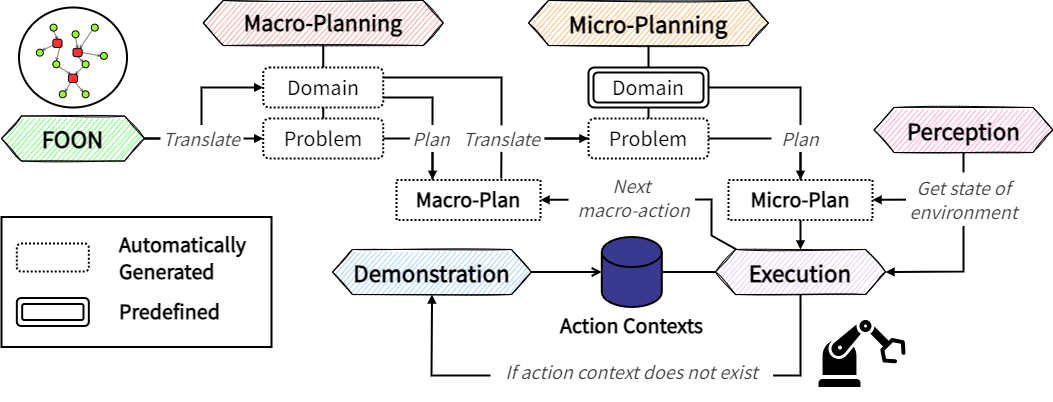
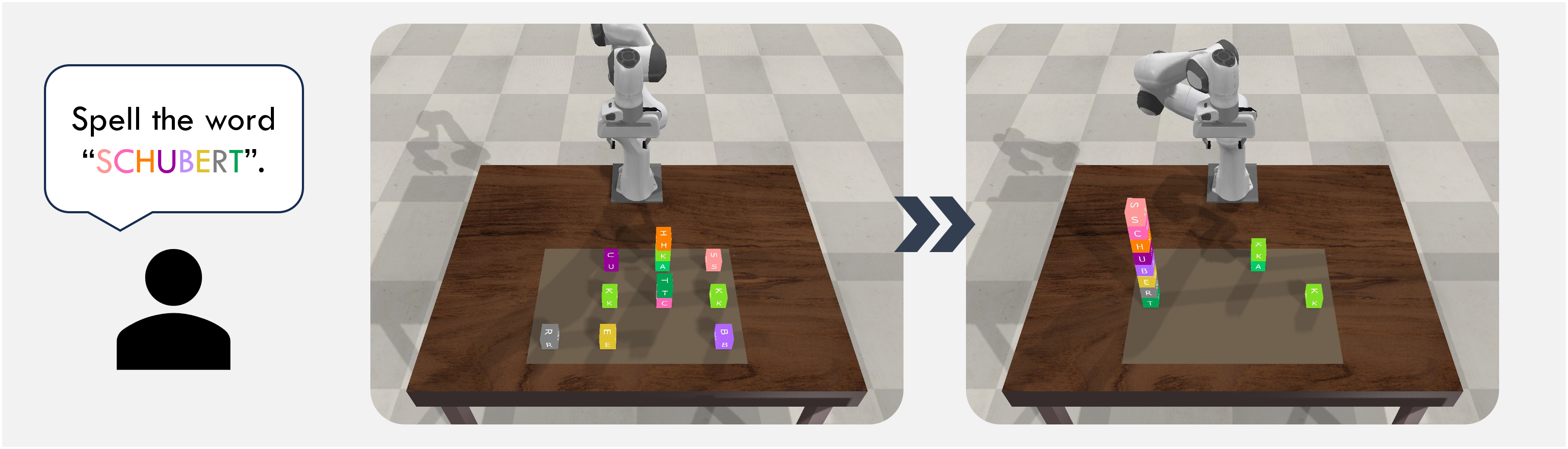
TL;DR – In this paper, we introduce the idea of connecting FOONs to robotic task and motion planning. We automatically transform a FOON graph, which exists at the object level (i.e., it is a representation that uses meaningful labels or expressions close to human language), into task planning specifications written in PDDL (not a very intuitive way to communicate about tasks).
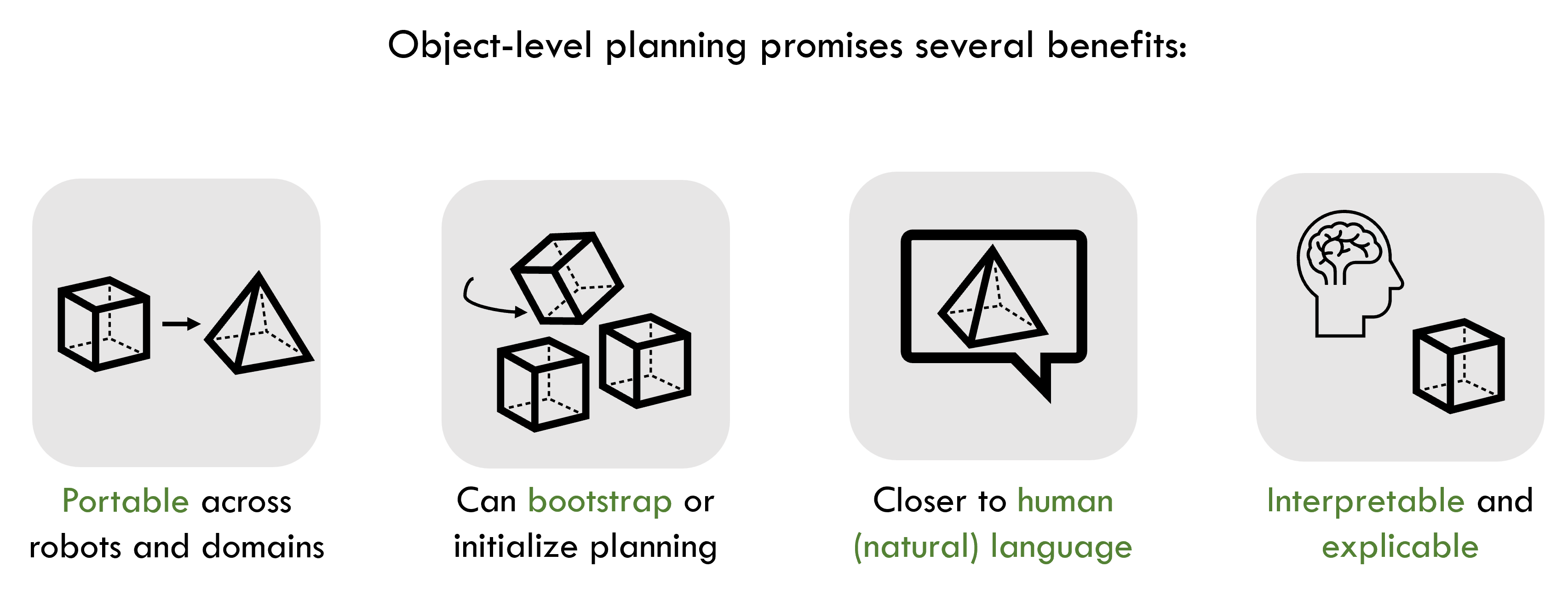
TL;DR – This workshop paper (specifically, a blue-sky submission) introduces the importance of object-level planning and representation as an additional layer on top of task and motion planning. I present several benefits of using object-level planning for long-term use in robotics.