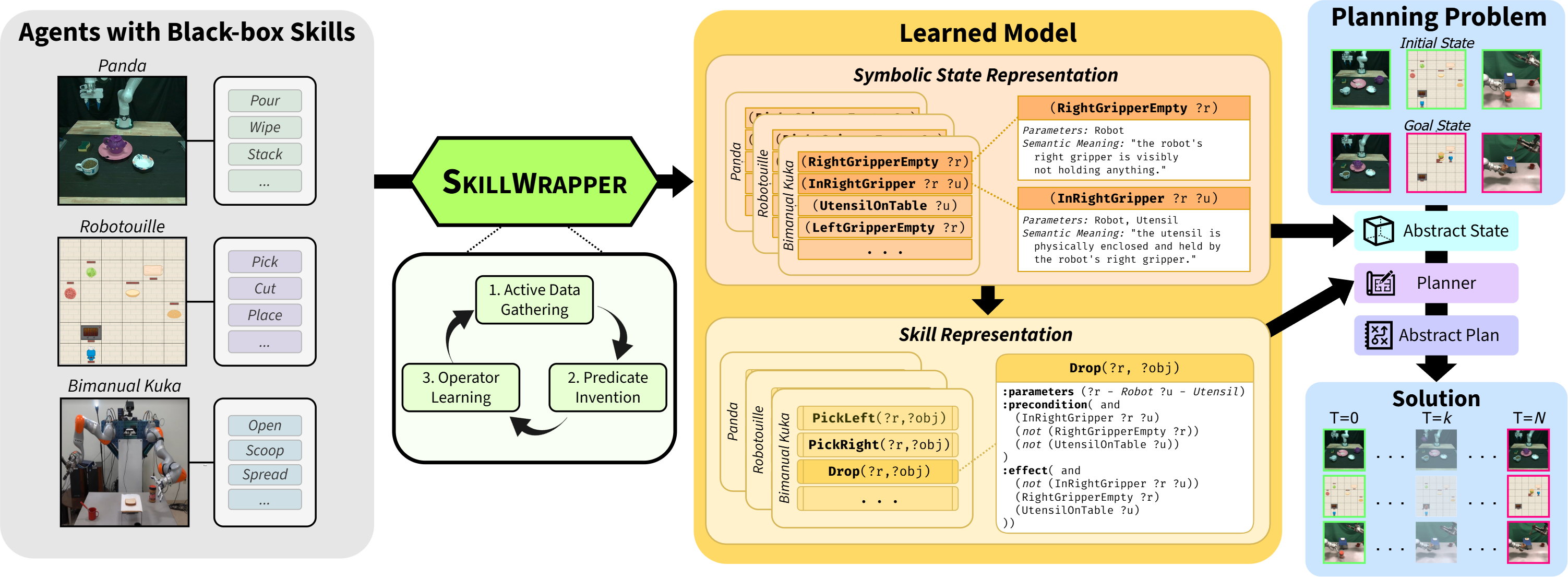
SkillWrapper: Generative Predicate Invention for Skill Abstraction
TL;DR – This paper introduces SkillWrapper, a system for creating abstract representations of skills using foundation models.
TL;DR – This paper introduces SkillWrapper, a system for creating abstract representations of skills using foundation models.
TL;DR – This paper introduces a new planning framework for object scouting called the Scouting Partial-Order Planner, which exploits partial order and regression planning to plan around gaps in knowledge the robot may have about the existence, location, and state of relevant objects in its environment.
TL;DR – This paper formalizes the concept of object-level planning and discusses how this level of planning naturally integrates with large language models (LLMs).
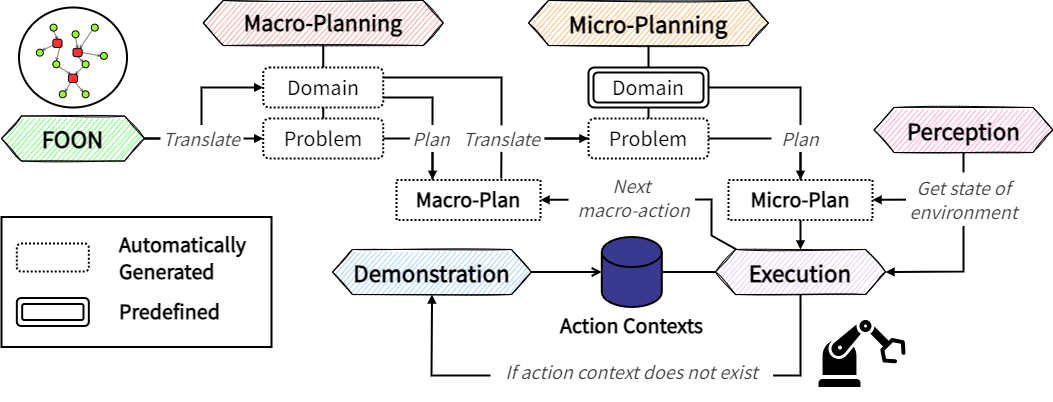
TL;DR – In this paper, we introduce the idea of connecting FOONs to robotic task and motion planning. We automatically transform a FOON graph, which exists at the object level (i.e., it is a representation that uses meaningful labels or expressions close to human language), into task planning specifications written in PDDL (not a very intuitive way to communicate about tasks).