SkillWrapper: Generative Predicate Invention for Skill Abstraction
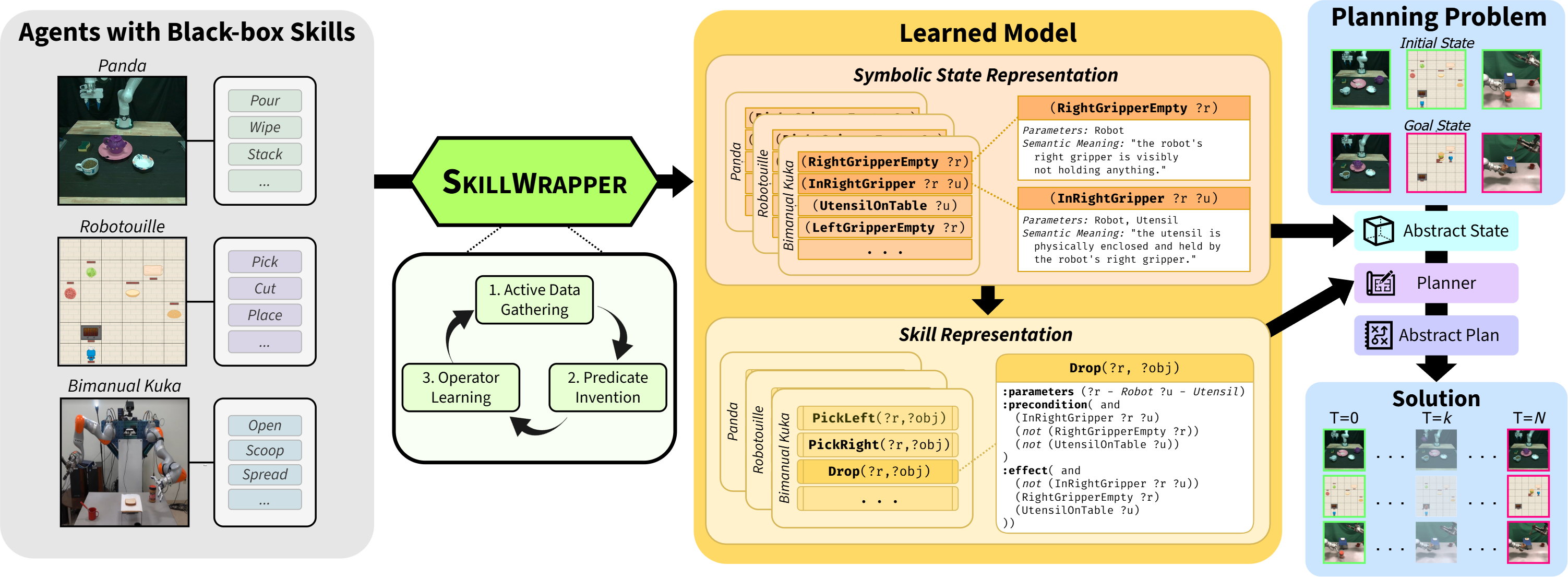
TL;DR – This paper introduces SkillWrapper, a system for creating abstract representations of skills using foundation models.
TL;DR – This paper introduces SkillWrapper, a system for creating abstract representations of skills using foundation models.
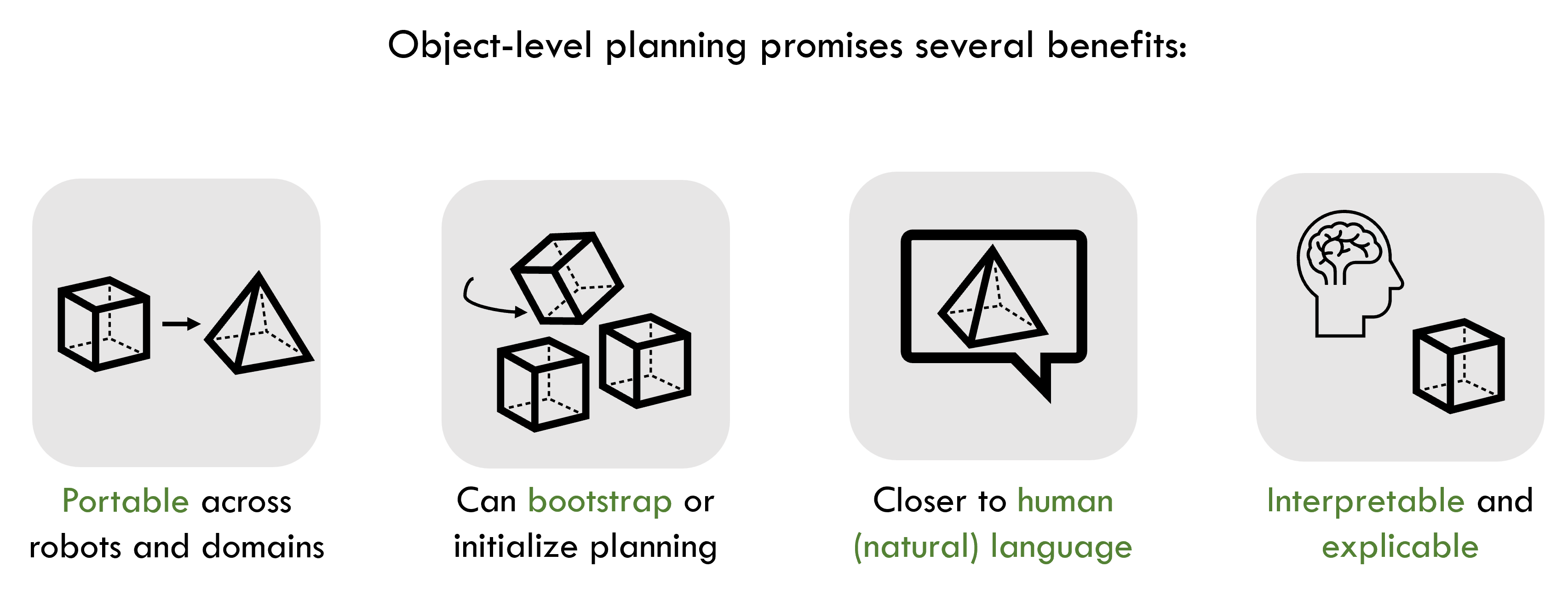
TL;DR – This workshop paper (specifically, a blue-sky submission) introduces the importance of object-level planning and representation as an additional layer on top of task and motion planning. I present several benefits of using object-level planning for long-term use in robotics.
TL;DR – This was my first survey paper that covers knowledge representations for service robotics. Although it is dated, it covers an extensive list of approaches used to represent knowledge for several robot sub-tasks.